Roboty przemysłowe na Wydziale Mechaniczno-Technologicznym
Globalna konkurencja, rosnące płace oraz niedobory kadry technicznej sprawiają, że automatyzacja i robotyzacja procesów stała się nieodzownym elementem strategii przedsiębiorstw produkcyjnych. Branża motoryzacyjna, lotnicza i elektromaszynowa wprowadza najnowsze technologie wytwarzania i organizacji produkcji, aby podnieść jakość oraz zapewnić powtarzalność produkcji. Jednym ze sposobów usprawnienia ciągu technologicznego jest zastosowanie robotów przemysłowych, m.in. w procesach spawania, odlewania, kontroli jakości, obróbki skrawaniem.
W odpowiedzi na wyzwania technologiczne XXI w. na Wydziale Mechaniczno-Technologicznym w Stalowej Woli zostało utworzone Laboratorium Robotyki, które ma być miejscem kształcenia kadr i doskonalenia technologii na potrzeby Przemysłu 4.0. Na jego stanie znajdują się cztery roboty wyposażone w oprzyrządowanie pozwalające na realizację działań z zakresu spawalnictwa, odlewnictwa, obróbki ubytkowej, paletyzacji i kontroli. Są to: jeden duży robot przemysłowy z oprzyrządowaniem laserowym, dwa mniejsze roboty przemysłowe o charakterze dydaktycznym z oprzyrządowaniem odlewniczym i obróbczym oraz nowoczesny co-bot (robot przeznaczony do bezpośredniej współpracy z człowiekiem) z oprzyrządowaniem paletyzacyjnym. Pracownia posiada również nowoczesne stanowiska dydaktyczne do automatyki przemysłowej, które zostały zintegrowane z robotem współpracującym. Dodatkowym elementem wyposażenia są stanowiska komputerowe służące do programowania i symulacji pracy robotów w trybie offline.
Z laboratorium korzystają głównie studenci specjalności „robotyzacja i organizacja procesów wytwarzania”. Widząc ogromne zapotrzebowanie na specjalistów z zakresu programowania robotów, Wydział Mechaniczno-Technologiczny realizuje roczne studia podyplomowe „Programowanie robotów przemysłowych”.
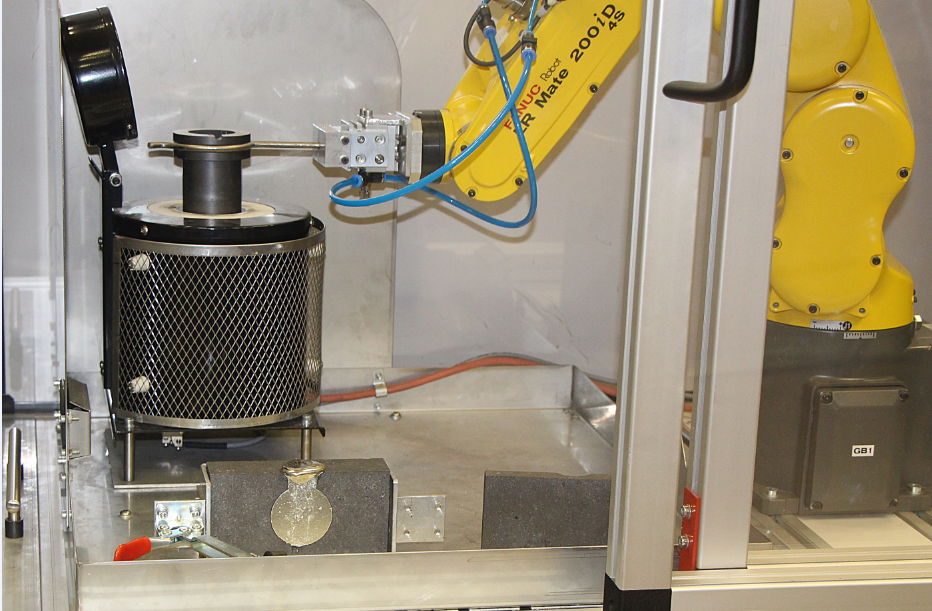
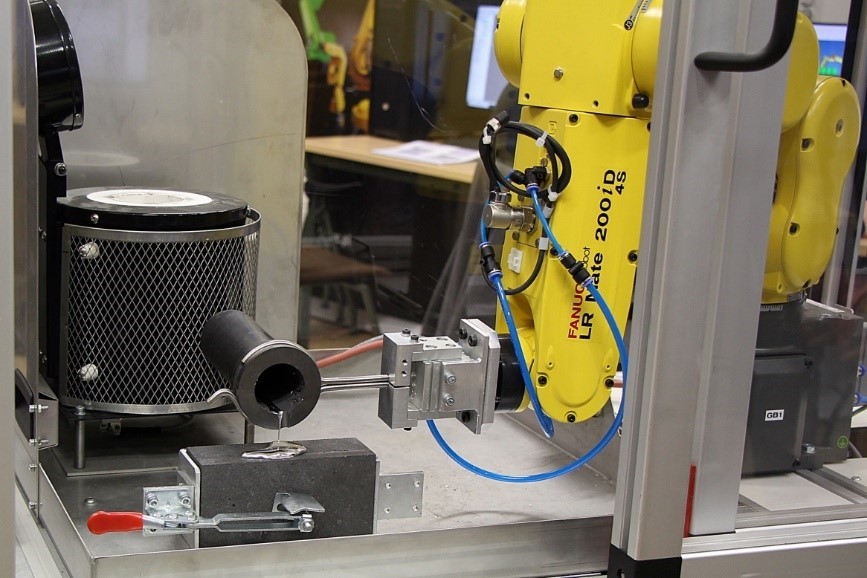
Robot FANUC LR Mate 200iD/4S może mieć zastosowanie w procesach produkcyjnych z ograniczoną przestrzenią roboczą. Posiada predyspozycje do pracy w zwartych gniazdach zrobotyzowanych i na liniach produkcyjnych. Został on wyposażony w różnego rodzaju inteligentne funkcje, m.in. czujniki wizyjne, czujniki siły, zestawy specjalnego zastosowania (chwytaki), umożliwiające realizację procesów odlewniczych. Znajduje zastosowanie m.in. w przemysłach obróbki skrawaniem, motoryzacyjnym, spożywczym, transportowym i elektronicznym. Robot ten jest wykorzystywany do usprawnienia operacji pobierania, odkładania lub pakowania produktów, a także obsługi innych maszyn. Jest przygotowany do obsługi wymagających procesów produkcji żywności. Stanowisko znajdujące się w Laboratorium Robotyki doposażono w unikatowy moduł do odlewania, który zaprojektowano na WMT. Dodatkowe dwa moduły technologiczne umożliwiają symulację przemieszczania palnika spawalniczego oraz obróbkę ścierną. Robot został zintegrowany z oprogramowaniem symulacyjnym FANUC ROBOGUIDE, co pozwala na projektowanie, planowanie aplikacji, wirtualne testowanie, zbieranie danych, optymalizację procesów produkcyjnych.
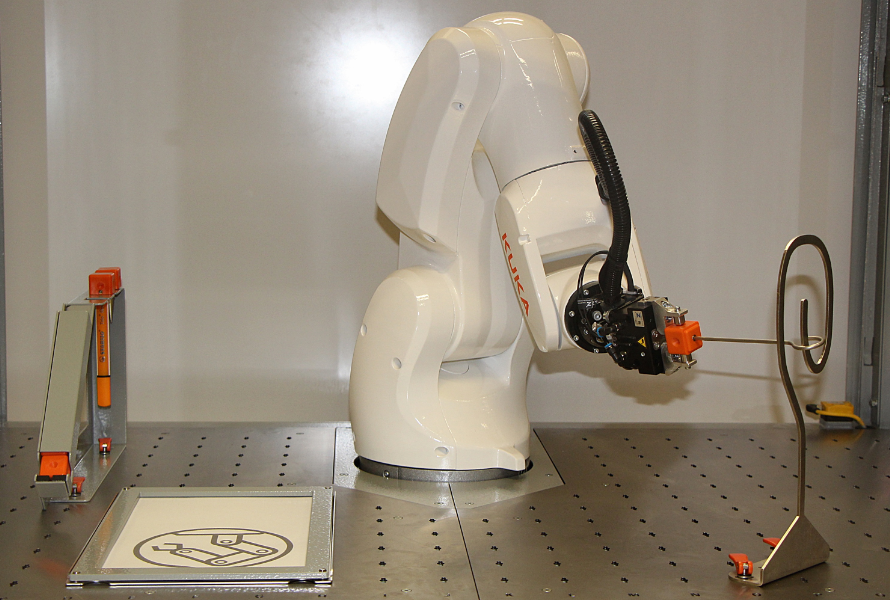
Kolejny robot to KUKA KR 3 R540 należący do serii robotów KR Agilus. Jest to urządzenie wykazujące precyzję pracy na małej przestrzeni roboczej. Znajduje zastosowanie w procesach produkcyjnych, m.in. do nakładania klejów, uszczelniaczy, lakierowania, spawania łukowego w atmosferze gazów ochronnych, pakowania, obsługi maszyn do odlewania ciśnieniowego metali, montażu małych elementów, przykręcania śrub czy kontroli jakości. Ze względu na szybkość wykonywania zadań może być użyty w miejscach, w których wymagane jest skrócenie czasu pracy i zwiększenie wydajności produkcji.
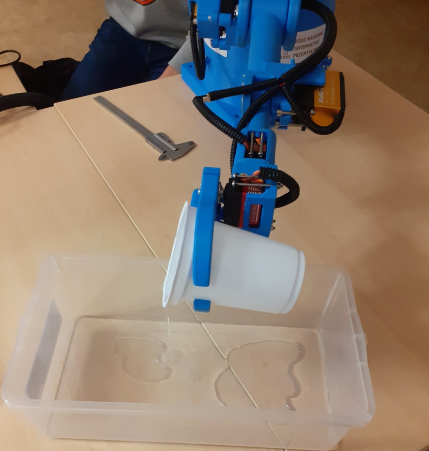
W laboratorium WMT znajduje się również robot współpracujący HCR-5, który może bezpiecznie pracować z człowiekiem, bez konieczności stosowania specjalistycznych barier ochronnych. Można go zainstalować obok operatora, ponieważ urządzenie zatrzymuje się, gdy wykryje kolizję zewnętrzną. Zapewnia łatwość programowania zgodnie z zasadą „uczenie przez pokazywanie” lub „rejestrowanie ścieżki, którą ma podążać”. Możliwe jest podłączenie dowolnych urządzeń peryferyjnych, które pozwalają na obsługę maszyn, linii produkcyjnych, przenoszenie elementów, rozładunek i załadunek, realizację procesów montażu, kontroli jakości. Możliwości zastosowania robotów z tej serii są bardzo duże, mogą być stosowane niemal w każdej branży. Ogromną zaletą robota jest jego precyzja – 100% bezbłędnej pracy według ściśle określonej procedury, co sprawia, że znalazł zastosowanie również w laboratoriach chemicznych i firmach farmaceutycznych. Do jego zadań należy m.in. precyzyjne lokalizowanie, przenoszenie i umieszczanie badanych próbek, obsługa wszelkiego rodzaju próbek (stałe, płynne, gazowe), odczyt kodów i opisów z próbek, archiwizacja i porównanie z wzorcem, integracja i sterowanie sprzętem laboratoryjnym. Robot HCR-5 na WMT jest programowany i wykorzystywany do zadań związanych z cieczami i materiałami sypkimi. Przemysłowe aplikacje takich robotów znajdują zastosowanie w motoryzacji, logistyce, spawalnictwie, specjalistycznych pracowniach laboratoryjnych oraz wykonywaniu precyzyjnych zadań przy współpracy z człowiekiem.
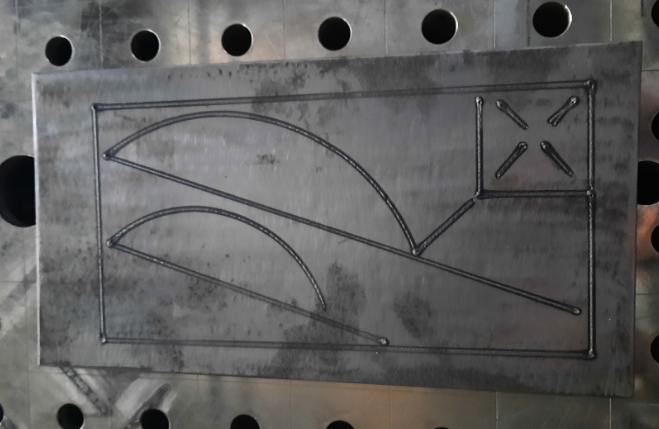
TruLaser Robot 5020 firmy TRUMPF jest przeznaczony do opracowywania i testowania nowych technologii spawania, cięcia, napawania (proszkowego i drutem pełnym) oraz obróbki cieplnej z wykorzystaniem wiązki lasera. Urządzenie zostało wyposażone w trzy niezależne rodzaje głowic: do spawania, cięcia i napawania, dwuosiowy pozycjoner oraz stół obrotowy. Posiada oprogramowanie do projektowania procesów spawalniczych, określania rzeczywistego położenia spawanych krawędzi i korekty toru ruchu robota. Źródłem zasilania jest laser pompowany diodowo.
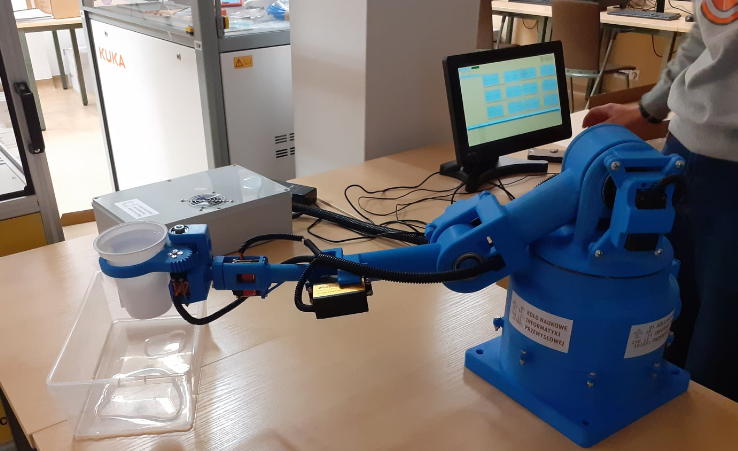
Koło Naukowe Informatyki Przemysłowej zainspirowane robotyzacją wykonało prototypowe ramię robota przemysłowego HUMERO. Projekt został zrealizowany przez dwóch studentów: Łukasza Kapałę i Aleksandra Janeczkę. Całość prac projektowych i konstrukcyjnych wykonano z wykorzystaniem dostępnych na WMT urządzeń i oprogramowania. Do wykonania obudowy, korpusu i ramion zastosowano proces drukowania przestrzennego 3D. Ramię robota posiada sześć ruchomych osi z możliwością niezależnego ich kontrolowania przez sprzężenie układu sterowania z funkcjonalnym interfejsem użytkownika. Głównym urządzeniem napędzającym robota są serwomechanizmy, czyli zamknięte układy sterowania zawierające małe silniki elektryczne połączone z przekładnią zębatą.
Wyposażenie Wydziału Mechaniczno-Technologicznego w roboty przemysłowe pozwala na zdobycie przez studentów umiejętności praktycznych związanych z robotyzacją i automatyzacją procesów wytwarzania. Ma to istotny wpływ na ich dalszą karierę zawodową po ukończeniu studiów. W związku z dynamicznie rozwijającym się Przemysłem 4.0 nabyta wiedza i doświadczenie zawodowe pozwoli absolwentom WMT na znalezienie atrakcyjnego zatrudnienia na stanowiskach technologów czy też programistów robotów przemysłowych.